前言
我们终于在年初的时候最后完成了整体服务器框架对C++20协程的支持和接入。虽然之前陆陆续续抽时间改造一些组件,让它支持C++20协程,期间也记录了一些早期的设计思路和踩的坑(包括 《libcopp接入C++20 Coroutine和一些过渡期的设计》和《libcopp对C++20协程的接入和接口设计》),其中不乏一些C++20协程使用上可能打破我们常规思路细节和编译器的BUG。而且这些都是各个组件的改造,并没有最后整合到一起。
而这次,总算是全部完成了改造,并且完成了主要RPC流程的测试。在最后的改造过程中,因为C++20协程还是比较新的东西,我们希望在某些开发环境测试新协程,老环境还是走原先的协程调用方式,我设计了一套对RPC和任务系统的抽象,让无论是新协程还是老协程的调用方式都保持一致。这次整合也是又新发现了一些问题和新的编译器BUG。(《libcopp对C++20协程的接入和接口设计》 里已经提过的踩坑点和编译器BUG这里不再复述。)
C++20协程的一些背景
之前在 《libcopp对C++20协程的接入和接口设计》 里已经做了一些文本上的设计和总结记录了,这里为了方便直观点,再提取一些重点吧。
首先C++20协程的原理是啥呢?我们可以借助 cppinsights( https://cppinsights.io/s/5e6b138c )来探其究竟。
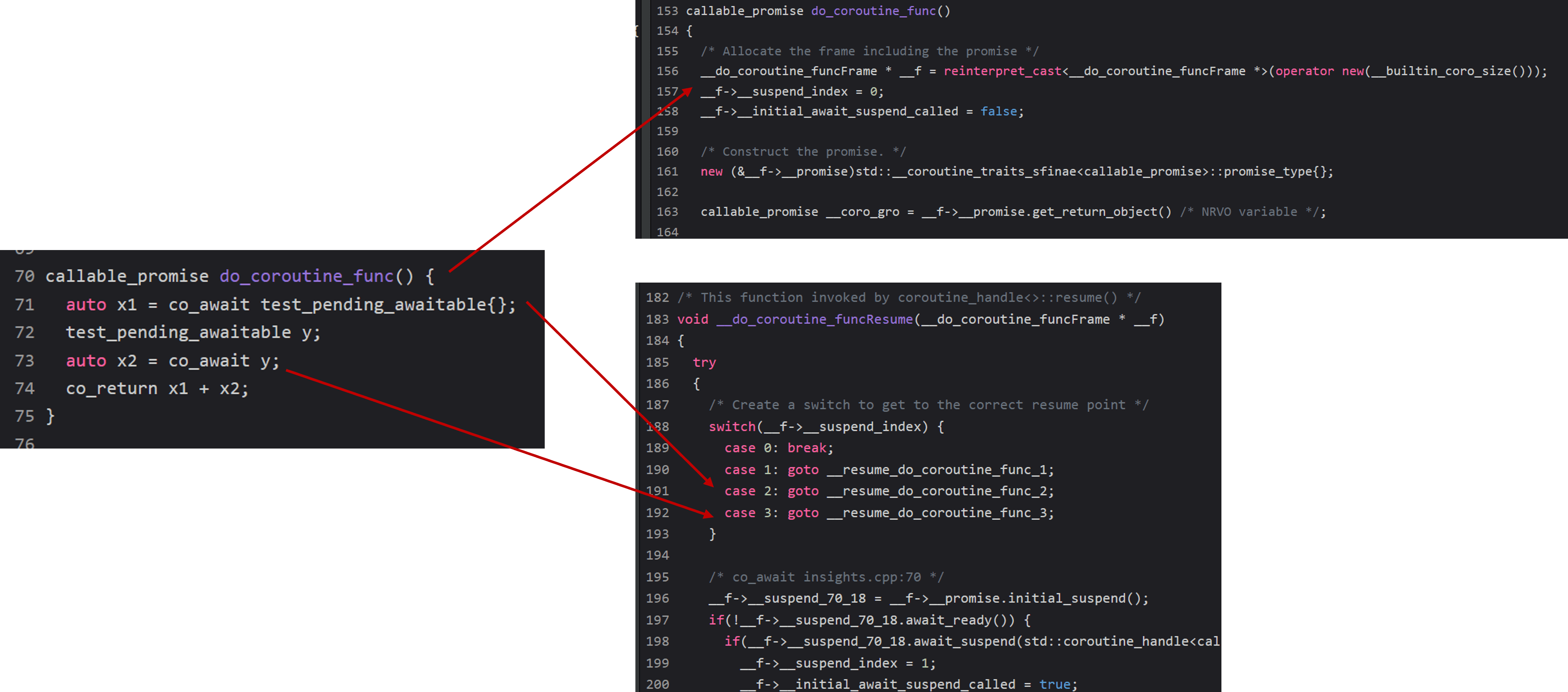
可以看到,本质上是创建了一个对象用来放协程栈上的变量,通过一个挂起点的状态机和 goto 去做resume状态。
而要接入C++20协程需要满足一下需求:
| C++20协程 – 返回值(T)类型要求 | C++20协程 – awaitable类型要求 |
|---|---|
| \[必须\] 声明类型 T::promise_type | \[必须\] 实现 awaitable::await_ready |
| \[必须\] 实现T::promise_type::get_return_object() -> T | \[必须\] 实现 awaitable:: await_suspend(handle) |
| \[必须\] 实现T::promise_type::initial_suspend()-> SUSPEND | \[必须\] 实现 awaitable:: await_resume |
| \[必须\] 实现T::promise_type::final_suspend()-> SUSPEND | \[可选\] 实现 co_await operator |
| \[必须\] 实现T::promise_type::return_void() : 和以下二选一 | |
| \[必须\] 实现T::promise_type::return_value() : 和以上二选一 | |
| \[可选\] 实现T::promise_type::unhandled_exception() | |
| \[可选\] 实现T::promise_type::await_transform(…) | |
| \[可选\] 实现 T::promise_type::get_return_object_on_allocation_failure() |
可以看出来,接入还是比较麻烦的,所以我们的协程库 libcopp 抽象了这些要求,简化使用难度。 另外,根据我们常见的使用场景,协程是使用上大概三大类:
- 业务层: 由于无栈协程是侵入式的,那么业务调用的时候其实上下文关系需要层层透传。要求高性能且调用频繁。
- 调度层: 在框架层,我们要能总控和调度资源,控制生命周期。
- 接入层: 一般用于各类SDK接入、event loop接入或者其他事件机制接入。用来把各类平台服务或者功能库抽象成统一的协程模型,需要适应各类接入方式。
那么我这里针对这三种使用场景设计了3个不同的结构。
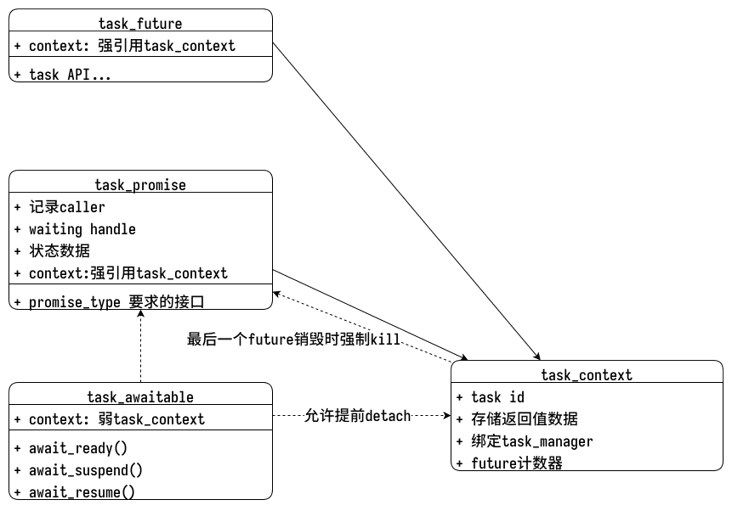
Task用于框架调度层,需要能够异步执行,能够脱离调用者的生命周期,并且需要能够提前终止,大致结构如下:
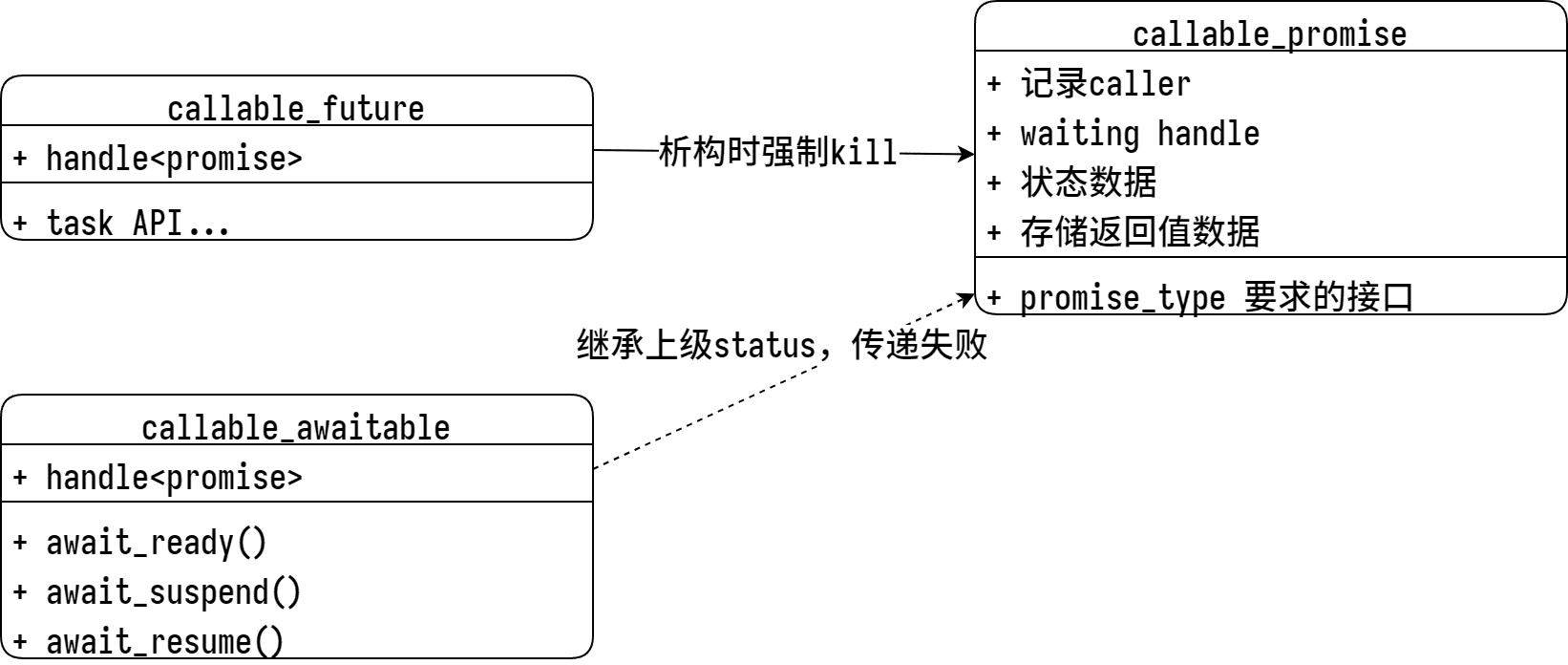
而Callable用于业务层,需要能够足够轻量,能够传递调用者和Task状态,大致结构如下:
我们可以对比一下之前有栈协程的使用情况。
| 功能点 | cotask::task<T> | C++20 coroutine | 附注 |
|---|---|---|---|
| 调度层 - 任务管理 | cotask::task<T> | task_future<TRETURN, TPRIVATE> | 前者的私有数据分配在栈上,通过接口获取。后者的私有数据就是 TPRIVATE |
| 接入层 - 延时操作 | task::resume(void*) | generator_future<TRETURN> | 前者通过参数 void* 指向自定义类型,需要外部额外检查数据有效性,后者内置 set_value 接口,自动管理有效性 |
| 业务层 - 组合 | task::yield(void*) | callable_future<TRETURN> | 前者通过参数 void* 指向自定义类型来接收数据,后者通过 co_await 的返回 |
| 返回值类型 | int | 自定义 |
那么接下来就是这些组件在实际项目框架中的落地。
框架任务模型和RPC模型的抽象
要实现能够一键切换老式有栈协程和新式C++20协程,需要把接口封装成两种调用形式一致。由于无栈协程是侵入式的,所以避免不了对原有接口做一些改造。 并且有些改造只能借助宏来完成,我们也尽量保证新老方式的切换对接口层的要求一致。
所有协程接口必须 co_await
由于我们的协程库(libcopp) 在父协程函数调用子协程函数没有调用 co_await 的话,子协程在析构时会进入 cancle 状态。而有栈协程是必须等待返回的,这里是第一个不一致的地方。
那么为了编译期能够检查这种不一致性,首先,我们就是给所有的协程接口增加了不能忽略返回值的标记,并把未使用的Warning转Error。
/**
* @brief nodiscard, 标记禁止忽略返回值
* usage:
* EXPLICIT_NODISCARD_ATTR int a;
* class EXPLICIT_NODISCARD_ATTR a;
* EXPLICIT_NODISCARD_ATTR int a();
*/
#if defined(__cplusplus) && __cplusplus >= 201703L
# define EXPLICIT_NODISCARD_ATTR [[nodiscard]]
#elif defined(__clang__)
# define EXPLICIT_NODISCARD_ATTR __attribute__((warn_unused_result))
#elif defined(__GNUC__) && ((__GNUC__ >= 4) || ((__GNUC__ == 3) && (__GNUC_MINOR__ >= 1)))
# define EXPLICIT_NODISCARD_ATTR __attribute__((warn_unused_result))
#elif defined(_MSC_VER) && _MSC_VER >= 1700 // vs 2012 or higher
# if _MSC_VER >= 1910 && defined(_MSVC_LANG) && _MSVC_LANG >= 201703L
# define EXPLICIT_NODISCARD_ATTR [[nodiscard]]
# else
# define EXPLICIT_NODISCARD_ATTR _Check_return_
# endif
#else
# define EXPLICIT_NODISCARD_ATTR
#endif给这些接口加 EXPLICIT_NODISCARD_ATTR 属性即可。接下来,我们会要求所有的协程调用必须使用我们提供的宏来 “co_await”,即便是忽略返回值,也需要显式指定 。宏的实现如下:
// When using c++20 coroutine, declare RPC_AWAIT_CODE_RESULT like this
#if defined(PROJECT_SERVER_FRAME_USE_STD_COROUTINE) && PROJECT_SERVER_FRAME_USE_STD_COROUTINE
# define RPC_AWAIT_IGNORE_RESULT(x) (::rpc::details::_ignore_result(co_await (x)))
# define RPC_AWAIT_IGNORE_VOID(x) (co_await (x))
# define RPC_AWAIT_TYPE_RESULT(...) (co_await (__VA_ARGS__))
# define RPC_RETURN_TYPE(...) co_return (__VA_ARGS__)
# define RPC_RETURN_VOID co_return
#else
# define RPC_AWAIT_IGNORE_RESULT(x) (::rpc::details::_ignore_result(x))
# define RPC_AWAIT_IGNORE_VOID(x) (::rpc::details::_ignore_void(x))
# define RPC_AWAIT_TYPE_RESULT(...) ::rpc::details::_get_rpc_result_value(__VA_ARGS__)
# define RPC_RETURN_VOID return ::rpc::result_void_type(true)
# define RPC_RETURN_TYPE(...) return ::rpc::details::_make_rpc_result_guard(__VA_ARGS__)
#endif
#define RPC_AWAIT_CODE_RESULT(...) RPC_AWAIT_TYPE_RESULT(__VA_ARGS__)可以看到,我们分别对返回 void 类型和返回非 void 类型都提供了await接口和return接口。在启用和不启用协程时走不通的分支。
另外,可以看到,我们对忽略返回值,采用了 ::rpc::details::_ignore_result 和 ::rpc::details::_ignore_void 包装,而没有使用 (void)(x) 这种形式。
这是因为 (void)(x) 这种形式是非标准的,某些编译器上仍然会报为未使用的Warning。
而我们对 void 类型有栈协程也不能直接返回 void ,而要包一层 result_void_type 也是因为 void 是没法判定 Unused 的。
在使用上,我们的调用形式就变成了:
int32_t res = RPC_AWAIT_CODE_RESULT(rpc::db::TABLE_SERVICE_CONFIGURE_DEF::get(get_shared_context(), 0, global_conf, &global_version));
if (PROJECT_NAMESPACE_ID::err::EN_DB_RECORD_NOT_FOUND == res) {
RPC_AWAIT_IGNORE_RESULT(rpc::db::TABLE_SERVICE_CONFIGURE_DEF::add(get_shared_context(), global_conf));
res = RPC_AWAIT_CODE_RESULT(rpc::db::TABLE_SERVICE_CONFIGURE_DEF::get(get_shared_context(), 0, global_conf, &global_version));
}而协程函数的实现,就变成了下面这种形式:
rpc::result_code_type player_manager::remove(rpc::context &ctx, player_manager::player_ptr_t u, bool force_kickoff) {
if (!u) {
RPC_RETURN_CODE(PROJECT_NAMESPACE_ID::err::EN_ROUTER_NOT_FOUND);
}
RPC_RETURN_CODE(RPC_AWAIT_CODE_RESULT(remove(ctx, u->get_user_id(), u->get_zone_id(), force_kickoff, u.get())));
}可以看到,就是 return 语句用宏代替掉了。
Task常见接口的切换封装
对于之前的一些使用方式,包括获取任务ID、判定退出状态等也需要做一层抽象。这和我们之前的使用方式有关,具体包含:
struct task_type_trait {
using internal_task_type = cotask::task_future;
using id_type = typename internal_task_type::id_type;
using task_type = internal_task_type;
using task_status = typename internal_task_type::task_status_type;
inline static id_type get_task_id(const task_type& task) noexcept;
inline static void reset_task(task_type& task) noexcept;
inline static bool empty(const task_type& task) noexcept;
inline static int32_t get_result(const task_type& task);
inline static bool is_exiting(task_status status) noexcept;
inline static bool is_timeout(task_status status);
inline static bool is_cancel(task_status status);
inline static bool is_fault(task_status status);
template
inline static bool is_exiting(const copp::callable_future& future) noexcept;
template
inline static bool is_timeout(const copp::callable_future& future) noexcept;
template
inline static bool is_cancel(const copp::callable_future& future) noexcept;
template
inline static bool is_fault(const copp::callable_future& future) noexcept;
template
inline static bool is_exiting(const cotask::task_future& task) noexcept;
template
inline static bool is_timeout(const cotask::task_future& task) noexcept;
template
inline static bool is_cancel(const cotask::task_future& task) noexcept;
template
inline static bool is_fault(const cotask::task_future& task) noexcept;
inline static task_private_data_type* get_private_data(task_type& task) noexcept;
}; 这里还有一个特殊的地方,新的C++20协程因为主调方无法感知被切出,所以没法像之前有栈协程一样提供一个 this_task 接口,来获取当前运行的协程和获取绑定在上面的用户层私有数据。
纵观之前使用 this_task 的用例,我们发现主要就三类:第一类用于获取Task ID。然后此类Task可能被其他Task await;第二类是获取状态,是否超时、是否被Kill等等;第三类是判定当前是否在协程中。
对于Task ID,因为我们要求所有的协程调用必须透传 rpc::context ,所以通过把协程Task ID和用户层私有数据都写入 rpc::context 里来解决。
对于第二类获取状态的,我们可以用过 libcopp 内置获取当前协程状态的 co_yield 接口来实现:
#if defined(PROJECT_SERVER_FRAME_USE_STD_COROUTINE) && PROJECT_SERVER_FRAME_USE_STD_COROUTINE
# define TASK_COMPAT_ASSIGN_CURRENT_STATUS(VAR_NAME) \
task_type_trait::task_status VAR_NAME = co_yield task_type_trait::internal_pick_current_status()
#else
# define TASK_COMPAT_ASSIGN_CURRENT_STATUS(VAR_NAME) \
task_type_trait::task_status VAR_NAME = \
task_type_trait::get_status(task_type_trait::internal_task_type::this_task())
#endif而对于第三类,现在不在协程中的协程调用,会直接编译不过。所以不需要再检查了。
协程lambda表达式的返回值
对于C++20协程是lambda的情况,由于直接 co_return 并不能让编译器对应的promise是什么类型,所以现在的lambda协程都必须指定返回值类型。
auto invoke_result = rpc::async_invoke(
ctx, "rpc_lru_cache_map.await_fetch",
[out, key, fn = std::move(fn)](rpc::context &child_ctx) -> rpc::result_code_type {
int32_t ret = RPC_AWAIT_CODE_RESULT(fn(child_ctx, key, out->data_object, &out->data_version));
if (task_type_trait::get_task_id(out->pulling_task) == child_ctx.get_task_context().task_id) {
task_type_trait::reset_task(out->pulling_task);
}
RPC_RETURN_CODE(ret);
});这里没有想到什么办法可以在使用有栈协程的时候,让编译器能检测出没有显示指定返回值类型。这里有感兴趣的同学也可以一起交流下。
task<T>::then() 的生命周期变化
在原先的有栈协程中,我们可以通过 task<T>::then(action) 来串联一些相关逻辑。比如在我们的UUID分配器代码中有一些串联和防惊群的逻辑。
因为要保证调用分配唯一ID接口顺序和实际响应顺序一致,我们分配到ID池后,通过then的回调来判定应该resume FIFO队列头的task。
在有栈协程的 task<T>::then(action) 中,action的生命周期是绑在 task<T> 之后的。而在新式的协程 task_promise 中,为了降低不必要的开销,我没有提供这类事件存储。
对这类典型的IO收敛任务的例子原先的流程如下:
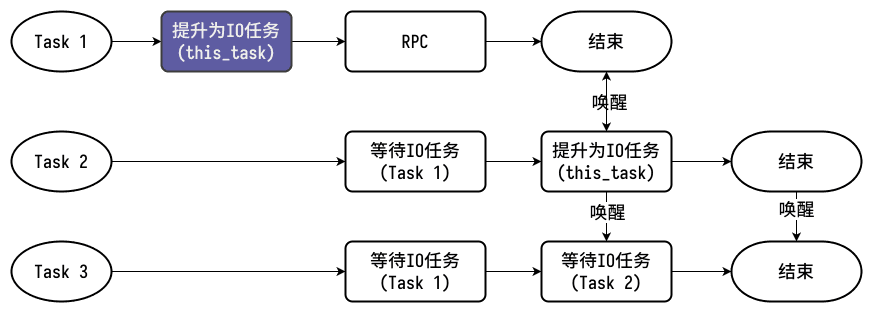
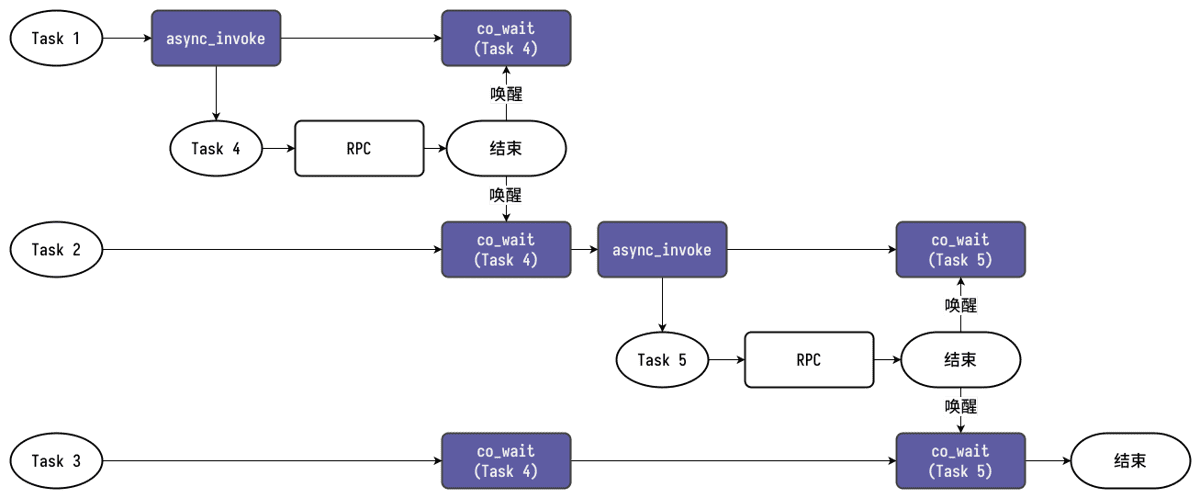
那么为了实现类似的功能,我这里提供了一个 async_then 接口,内部通过 async_invoke 来启动一个新协程,由同一个 task_manager 管理生命周期。然后内部去 co_await 需要等待的协程。
实现如下:
template
void async_then(context &ctx, gsl::string_view name, task_type_trait::task_type waiting, TCALLABLE &&callable,
TARGS &&...args) {
if (task_type_trait::empty(waiting) || task_type_trait::is_exiting(waiting)) {
callable(std::forward(args)...);
return;
}
async_invoke_result result = async_invoke(
ctx, name, [waiting = std::move(waiting), callable, args...](rpc::context &child_ctx) -> rpc::result_code_type {
auto ret = RPC_AWAIT_CODE_RESULT(rpc::wait_task(child_ctx, waiting));
callable(std::forward(args)...);
RPC_RETURN_CODE(ret);
});
if (result.is_success()) {
return;
}
FWLOGERROR("Try to invoke task({}) to wait task {} and then call callable failed, try to call it directly.", name,
task_type_trait::get_task_id(waiting));
callable(std::forward(args)...);
} 使用 async_then ,对应上文提到的典型IO收敛任务,现在的流程如下:
编译器BUG
本次发现的新的编译器BUG不是很多,这里记录一下可能其他同学也会碰到。我们封装接口的时候尽量避开就好了。
GCC 12.2
GCC碰到的BUG简单来说就是 使用 obj.member = co_yield TEMPLATE::func(); 这种形式的代码时,编译会Crash,报 <source>:79:16: internal compiler error: in instantiate_type, at cp/class.cc:8742 。必须赋值左边是一个结构体。右边是一个模板的函数返回的对象可以被 co_await 。
重现代码如下:
#include
#include
#include
template
struct task;
template
struct task_private_data {
inline task_private_data() noexcept : data_(nullptr) {}
inline task_private_data(PrivateDataType* input) noexcept : data_(input) {}
inline task_private_data(task_private_data&& other) noexcept = default;
inline task_private_data& operator=(task_private_data&&) noexcept = default;
inline task_private_data(const task_private_data&) = delete;
inline task_private_data& operator=(const task_private_data&) = delete;
inline ~task_private_data() {}
inline bool await_ready() const noexcept { return true; }
inline PrivateDataType* await_resume() const noexcept { return data_; }
inline void await_suspend(std::coroutine_handle<>) noexcept {}
PrivateDataType* data_;
};
template
struct task_context {
PrivateDataType data_;
};
template
struct task {
using self_type = task;
std::shared_ptr> context_;
task(const std::shared_ptr>& input): context_(input) {}
static auto yield_private_data() noexcept { return task_private_data{}; }
struct promise_type {
std::shared_ptr> context_;
template
promise_type(Input&& input, Rest&&...) {
context_ = std::make_shared>();
context_->data_ = std::forward(input);
}
auto get_return_object() noexcept { return self_type{context_}; }
std::suspend_never initial_suspend() noexcept { return {}; }
std::suspend_never final_suspend() noexcept { return {}; }
void unhandled_exception() { throw; }
template
void return_value(ReturnType&&) {}
template
inline task_private_data yield_value(
task_private_data&& input) noexcept {
input.data_ = &context_->data_;
return task_private_data(input.data_);
}
};
};
template
task call1(TArg&& arg, OutputType& output) {
OutputType* ptr = co_yield task::yield_private_data();
output = *ptr;
co_return 0;
}
struct container {
std::string* ptr;
};
template
task call2(TArg&& arg, container& output) {
output.ptr = co_yield task::yield_private_data();
co_return 0;
}
int main() {
// success
std::string output1;
call1(std::string("hello1"), output1);
std::cout<< "output1: "<< output1<< std::endl;
// crash
container output2;
auto task2 = call2(std::string("hello2"), output2);
std::cout<< "output2: "<< *output2.ptr<< std::endl;
return 0;
} 也可以看 https://godbolt.org/z/d5M9ca567 这里对比和Clang的输出结果。
我给GCC的BUG单 https://gcc.gnu.org/bugzilla/show_bug.cgi?id=108620 也有其他人发现了相似问题,但是似乎目前还没人认领。
MSVC 17.5
MSVC的这个BUG比GCC的要轻微得多,因为首先代码是错误的。
如上面的cppinsights的展示的C++20协程的原理中,C++20协程函数返回的对象其实是一个Promise类型。
那么可能比较自然的能想到,如果我在两个函数里 call_parent() 会调用 call_child() 且返回值一样,某些情况是否可以直接 return call_child() 的返回值,而不使用 co_return ?
然后其他分支可以继续使用 co_return ?实际上MSVC有个扩展是 return 和 co_return 混合使用,默认是不开的。而这个BUG的触发条件是,我们完全不使用 co_return,直接对协程函数使用 return 语句。
并且这个返会的对象被上层 co_await ,MSVC就会出现编译器内部错误。这里完整调用链的代码比较长就不贴了。
另外MSVC目前版本在协程内调用 std::rethrow_exception 会Crash,所以 libcopp 目前在C++20不再捕获unhandle_exception,可以由业务层自己处理。
写在最后
我们的框架方案和底层协程库都是开源的,协程库(libcopp)开源地址在 https://github.com/owent/libcopp 。
框架方案的开源版本在 https://github.com/atframework/atsf4g-co/tree/sample_solution ,可以通过cmake编译选项 PROJECT_SERVER_FRAME_USE_STD_COROUTINE 手动设置使用C++20协程还是老式有栈协程(默认在编译器支持的情况下,优先使用C++20协程)。
整个新协程的实现接入过程中,由于C++20协程能够让我们对类型信息做更多地编译期处理,我也优化了框架层很多类型检测的细节。这些不是C++20协程接入的必须项,这里就不列出了。
欢迎有兴趣的小伙伴们互相交流。